Projects
Integrated motion measurement systems have their technical origin in integrated navigation systems. The latter combine e.g. inertial sensors and radio navigation receivers to allow a high-quality motion detection of navigating vehicles. However, they use, as a basic requirement, the assumption that the vehicle is a rigid and nearly punctiform single body.
On the other hand, the performance of the components of modern integrated navigation systems allows waiving the requirement of a single rigid vehicle and extending the motion detection to additional mechanical degrees of freedom. Thus, the scope of such integrated systems can be widened to flexible structures of large aircraft, space stations, mobile robots, and the like. In this case, the motion detection for structure control and structural health monitoring rather than for navigation is paramount.
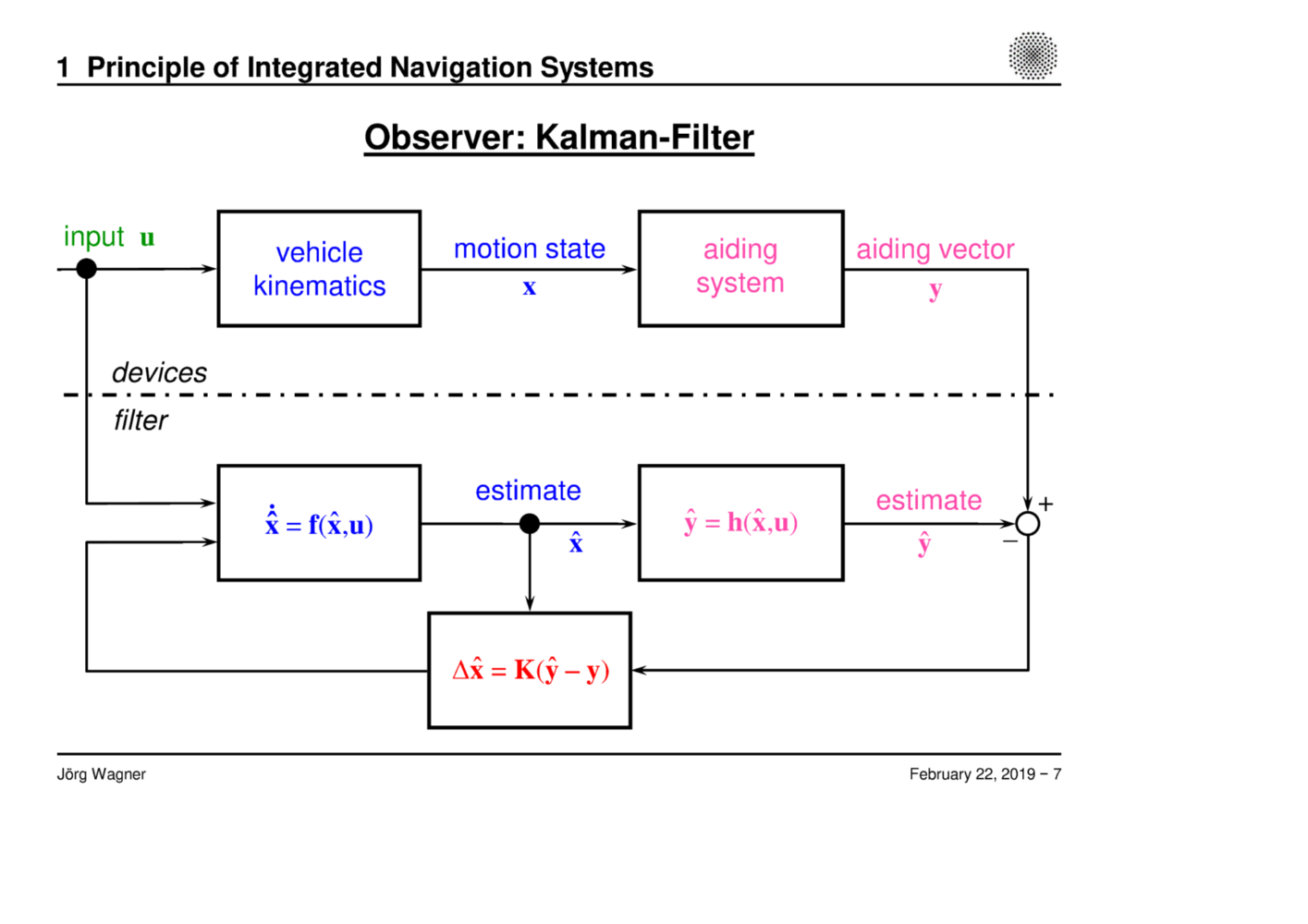
The design of such integrated motion measurement systems requires distributing sensors of different kind over the structure. In addition, a specific kinematical model of the structure has to be established in order to represent interesting deformations and joint positions. The model is used for the description of the moving structure and the physical meaning of the sensor signals within a data filter being depicted below. Here, x is the interesting motion state, f a function describing the structural motion, h a function describing measurement signals, und u symbolizes the motion excitation.
Integrated navigation systems are used to determine the motion state of vehicles, each of which is to be regarded as a single, compact, rigid body. Such systems typically combine signals from inertial sensors and satellite systems such as GPS. Here, the basic idea is the combination of different measurement signals of different physical meaning with the intention to combine the advantages of unequal, complementary sensors and compensate for any disadvantages.
The assumption of a single rigid body inside integrated navigation systems is appropriate for small vehicles. However, if one looks at vehicle structures such as large aircraft, space stations, and mobile robots or even stationary structures such as skyscrapers, the assumption of a rigid structure is no longer fulfilled here. On the other hand, taking into account not only the dimensions but also the shape change of a structure, the performance and reliability of integrated navigation systems can be increased. Also the applicability to e.g. structural control or structural health monitoring results. To capture the flexibility of the structure, however, the sensors must now be distributed over the vehicle structure. In such cases it is more appropriate to speak of integrated motion measurement.
As part of the VIBES project, the design of such integrated motion measurement methods for beam-like structures, such as those of e.g. aircraft wings, was investigated and experimentally tested. The focus was on the adequate kinematic description of the beam deformations, e.g. with vibration modes and Krylov vectors as well as various sensor configurations, i.e. different types as well as distributions of sensors. With this work, the applicability and usefulness of the integrated movement measurement methods for beam structures could be verified simulatively and experimentally.
The work was funded by the German Science Foundation DFG (grants: WA 1583/3-1 and WA 1583/3-3).
References:
- Örtel, T.; Wagner, J.; Saupe, F.: Integrated motion measurement illustrated by a cantilever beam. In: Mechanical Systems and Signal Processing 34 (2013), pp. 131-145
Abstract - Örtel, T.: Integrierte Bewegungsmessung an flexiblen Strukturen. München: Verlag Dr. Hut, 2010
- Örtel, T.; Wagner, J.: Integrated Motion Measurement for Flexible Structures Using a Modal and Krylov Subspace Model Reduction Approach. In: Journal of Intelligent Material Systems and Structures 20 (2009), No. 15, pp. 1889-1898
Abstract - Örtel, T.; Wagner, J.: Integrated Motion Measurement for Flexible Structures. In: Technische Mechanik 27 (2007), No. 2, pp. 94-114
Download - Wagner, J.: Adapting the Principle of Integrated Navigation Systems to Measuring the Motion of Rigid Multibody Systems. In: Multibody System Dynamics 11 (2004), No. 1, pp. 87-110
Abstract - Wagner, J.; Kasties, G.: Applying the Principle of Integrated Navigation Systems to Estimating the Motion of Large Vehicles. In: Aerospace Science and Technology 8 (2004), No. 2, pp. 155-166
Abstract - Wagner, J.: Zur Verallgemeinerung integrierter Navigationssysteme auf räumlich verteilte Sensoren und flexible Fahrzeugstrukturen. Düsseldorf: VDI Verlag, 2003
Download
A central feature of the Experimental Modal Analysis for determining the vibration properties of elastic structures are spatially distributed accelerometers. In contrast to this frequency-based method, real-time-based tasks such as motion control or structural health monitoring of such mechanical systems have so far made little use of distributed inertial sensors. In order to improve approaches for such tasks, therefore, a deeper measurement of the structural movement with distributed accelerometers and additional gyroscopes and strain gauges suggests itself. For such an application of the integrated motion measurement, however, it should be noted that the number of sensor signals used cannot be arbitrarily high.
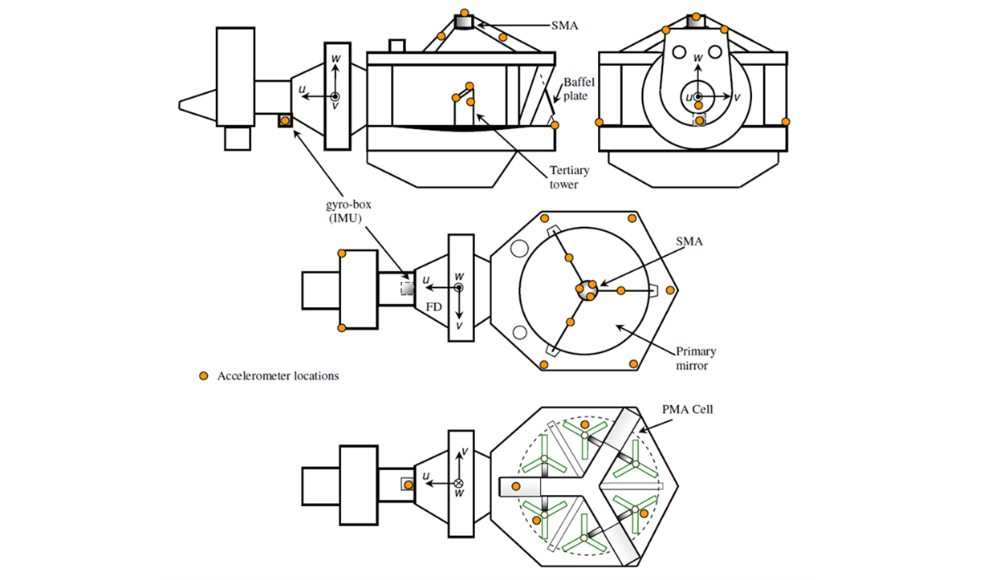
In contrast to the flexible beam theory (VIBES project), the project for the telescope of the SOFIA flying observatory is following a three-dimensional approach. This is intended to provide an integrated method for real-time estimation of the critical, i.e. optically disturbing, telescopic vibrations. The vibrations are caused by aeroacoustic disturbances.
To realize such an integrated measurement system, no mass and stiffness properties of the structure are required. For the implementation of this method, however, the approximate knowledge of the modal properties of the structure is necessary. Therefore, a Finite Element model of the telescope was chosen as the basis to extract such modal properties. In addition, the Finite Element model was used to determine the proper number, position and orientation of the gyros, accelerometers and strain gauges. The simulation results show the potential of the approach and its feasibility for complex lightweight structures.
References:
- Kaswekar, P.: Integrated motion measurement of three-dimensional lightweight structures. München: Verlag Dr. Hut, 2017
- Kaswekar, P.; Wagner, J.: Sensor fusion based vibration estimation using inertial sensors for a complex lightweight structure. In: Trommer, G. (ed.): 2015 DGON Inertial Sensors and Systems. Karlsruhe: IEEE, 2015, pp. 10.1-10.20
Abstract - Kaswekar, P.; Greiner, B.; Wagner, J.: The integrated motion measurement simulation for SOFIA. In: Stepp, L.; Gilmozzi, R.; Hall, H. (Hrsg.): Ground-based and Airborne Telescopes V, Proc. of SPIE. Vol. 9145. Bellingham, WA: SPIE, 2014, pp. 91454F.1-91454F.15
Abstract - Wagner, J.: Adapting the Principle of Integrated Navigation Systems to Measuring the Motion of Rigid Multibody Systems. In: Multibody System Dynamics 11 (2004), No. 1, pp. 87-110
Abstract - Wagner, J.; Kasties, G.: Applying the Principle of Integrated Navigation Systems to Estimating the Motion of Large Vehicles. In: Aerospace Science and Technology 8 (2004), No. 2, pp. 155-166
Abstract - Wagner, J.: Zur Verallgemeinerung integrierter Navigationssysteme auf räumlich verteilte Sensoren und flexible Fahrzeugstrukturen. Düsseldorf: VDI Verlag, 2003
Download
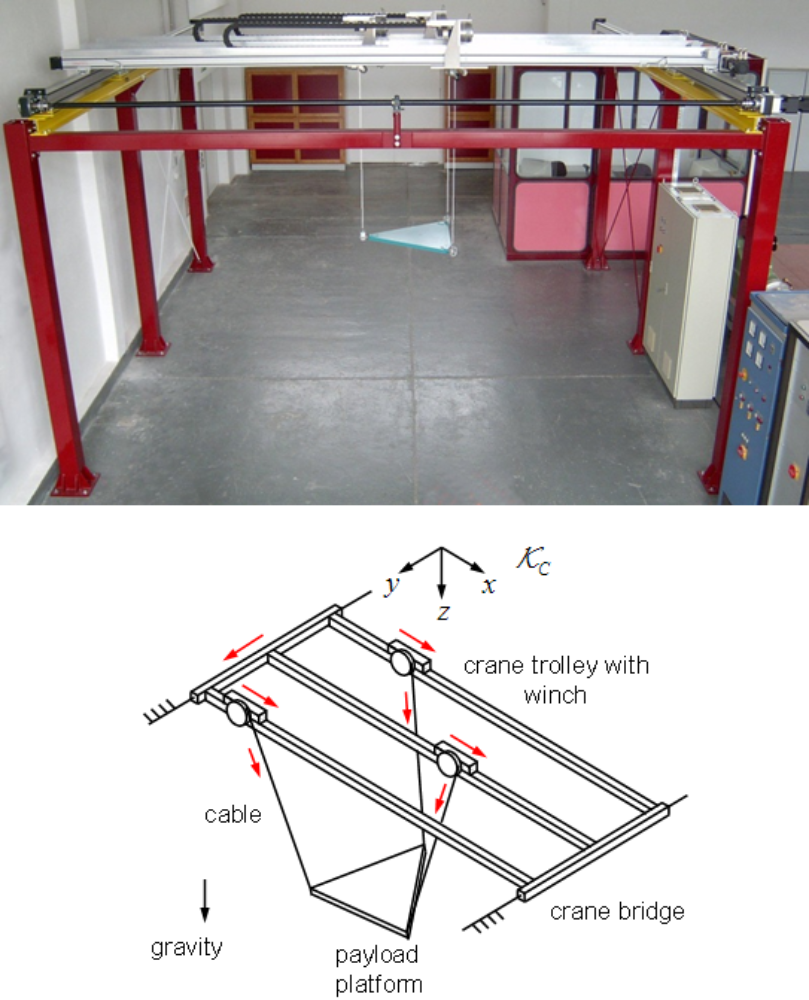
For cranes, the avoidance of pendulum oscillations of the payload places high demands on the skill of the crane operator. To relieve the operator, the pendulum vibrations can be automatically damped by a control system. This requires information about the actual motion state of the payload. Motion estimates are based on mathematical procedures and various sensor signals. If the speed of the payload platform is determined in addition to the position, position and speed controllers can be used for the pendulum damping, which provide better control dynamics than pure position controllers.
The CABLEV project (CABle LEVitation) investigated the use of an inertial measurement unit and integrated motion measurement systems to improve the detection of the motion state of the payload of cranes. The basis for this was the rope-guided handling system of the same name developed at the Chair of Technical Mechanics / Dynamics of the University of Rostock. Within the scope of the work, the fundamental applicability and the significant benefits of the integrated motion measurement methods on the control of cranes could be demonstrated.
The work was a cooperation with the Chair of Technical Mechanics / Dynamics, University of Rostock. It was funded by the German Science Foundation DFG (grants: WA 1583/5-1und WO 452/7-2).
References:
- Meinicke, A.:, S.: Kalibrierung von Inertialmesssystemen und integrierte Navigation zur Lageregelung eines Mehrseilkrans. Universität Rostock, Diss., 2009
- Meinicke, A.; Woernle, C.; Wagner, J.: Kompensation der Lagefehler der Inertialsensoren in einer IMU. In: Proc. in Appl. Math. and Mech.: PAMM 6 (2006), pp. 103-104
Download

Classic technical applications of inertial sensors are characterized by high demands on accuracy and reliability. In biomechanics, on the other hand, demands for small size, low weight, low costs and easy handling often dominate. The background of these requirements are applications in sports such as performance and competition diagnostics and in medicine such as clinical diagnostics, tracking of rehabilitation courses or acquisition of motor learning.
The Chair has many years of experience in the design of measuring systems for research especially on balance motor skills. This includes the first gyroscopic measurement system for rowing boats, which pioneered the world, as well as an integrated measuring system for ankle exercise boards, which was tailored to the particular kinematic conditions of this device.
References:
- Wagner, J.: About Motion Measurement in Sports Based on Gyroscopes and Accelerometers - an Engineering Point of View. In: Gyroscopy and Navigation 9 (2018), No. 1, pp. 1-18
Abstract - Wagner, J.: Inertial and Integrated Motion Measurement Systems in Biomechanics. In: 23rd Saint Petersburg International Conference on Integrated Navigation Systems. St. Petersburg: State Research Center of the Russian Federation, Concern CSRI Elektropribor, JSC, 2016, pp. 467-477
Abstract - Lippens, V.; Nagel, V.; Wagner, J.: Geschickte Koordinations-Leistung in bewegten Situationen. Zur Regulation eines dynamischen Systemgleichgewichts in gerätegebundenen Sportarten. In: Nagel, V. (Hrsg.): Inline-Skating: Trends - Entwicklungsperspektiven - Anwendungsfelder. Hamburg: Czwalina, 2010, pp. 89-100
Abstract - Wagner, J. et al.: Generalising Integrated Navigation Systems: The Example of the Attitude Reference System for an Ankle Exercise Board. In: Sorg, H. (ed.): Symposium Gyro Technology 2001. Stuttgart: Universität Stuttgart / Deutsche Gesellschaft für Ortung und Navigation, 2001, pp. 18.1-18.16
Abstract - Wagner, J.; Bartmus, U.; de Marées, H.: Three-Axes Gyro System Quantifying the Specific Balance of Rowing. In: International Journal of Sports Medicine 14 (1993), Supplement No. 1, pp. S35-S38
Abstract