Projekte
Integrierte Bewegungsmesssysteme haben Ihren technischen Ursprung in integrierten Navigationssystemen. Letztere kombinieren z.B. Inertialsensoren und Funknavigationsempfänger, um eine hochwertige Bewegungserfassung navigierender Fahrzeuge zu erlauben. Sie gehen jedoch von der Grundvoraussetzung der Bewegung eines einzelnen, starren, punktförmigen Fahrzeugs aus.
Das Leistungsvermögen der Komponenten moderner integrierter Navigationssysteme erlaubt es freilich, die Voraussetzung eines starren Fahrzeugs aufzugeben und die Bewegungserfassung auf zusätzliche mechanische Freiheitsgrade auszudehnen. Damit kann der Anwendungsbereich solch integrierter Systeme auf flexible Strukturen großer Flugzeuge, Raumstationen, Mobilroboter und dergleichen ausgedehnt werden. Hierbei steht dann jedoch nicht allein die Navigation, sondern die Bewegungserfassung für die Strukturregelung und -überwachung im Vordergrund.
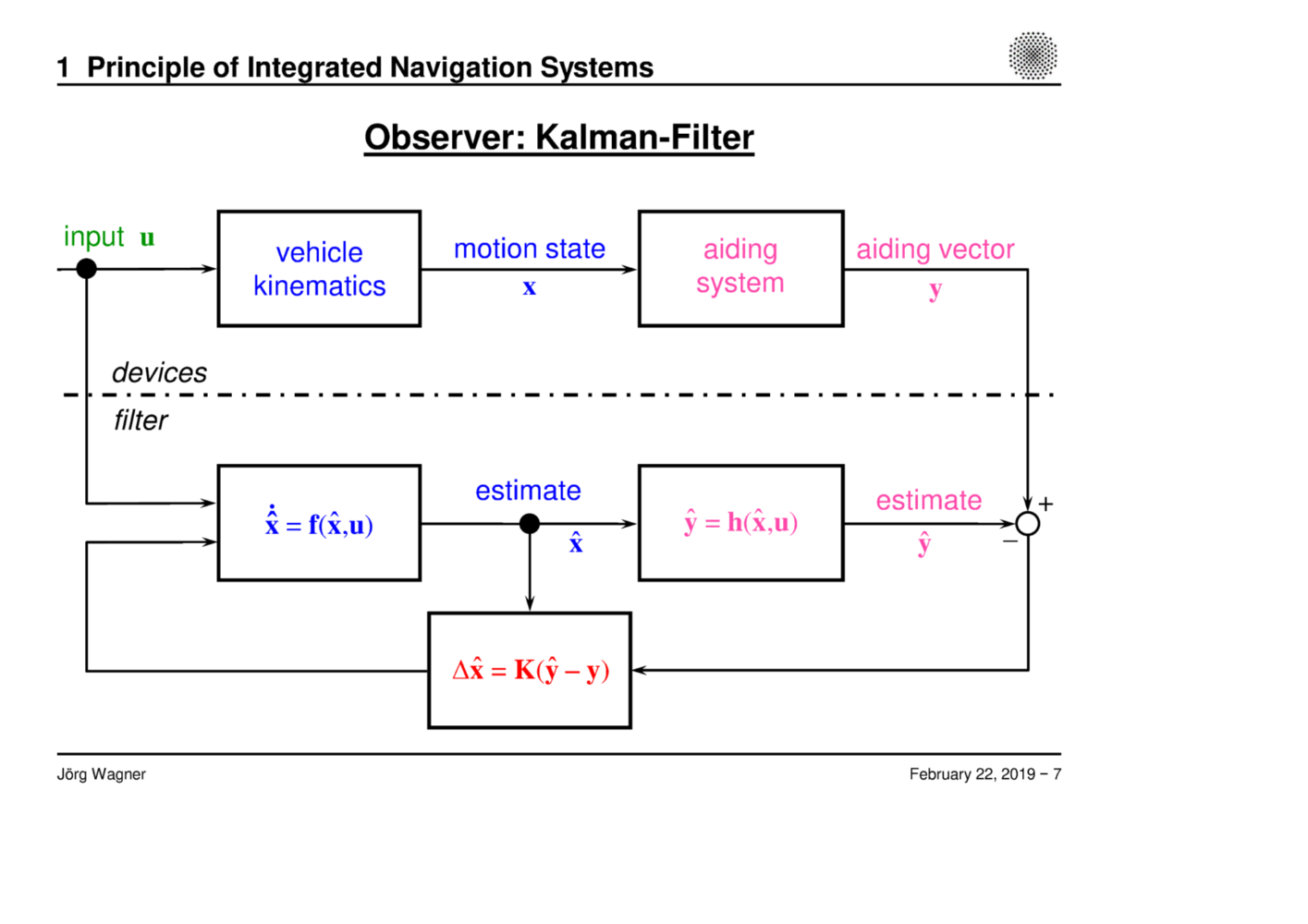
Zur Auslegung solcher integrierter Bewegungsmesssysteme ist es einerseits erforderlich, verschiedenartige Sensoren über die Struktur zu verteilen. Andererseits muss ein spezifisches kinematisches Strukturmodell erstellt werden, das interessierende Verformungen oder Gelenkbewegungen mit einschließt. Verwendung findet das Modell bei der Beschreibung der bewegten Struktur und der Messgrößen innerhalb eines Datenfusionsfilters, das nachstehend abgebildet ist. Hierbei ist x der gesuchte Bewegungszustand, f eine Funktion zur Beschreibung der Strukturbewegung, h eine Funktion zur Beschreibung von Messgrößen, und u stellt die Anregung der Bewegung dar.
Integrierte Navigationssysteme werden zur Ermittlung des Bewegungszustandes von Fahrzeugen eingesetzt, die jeweils als einzelner, kompakter, starrer Körper anzusehen sind. Solche Systeme kombinieren typischerweise Signale von Inertialsensoren und Satellitensystemen wie GPS. Die Grundidee ist dabei die Kombination verschiedener Messsignale unterschiedlicher physikalischer Bedeutung mit der Absicht, die Vorteile ungleicher, komplementärer Sensoren zu kombinieren und eventuelle Nachteile zu kompensieren.
Die Annahme eines einzelnen starren Körpers, die den integrierten Navigationssystemen zugrunde liegt, ist für kleine Fahrzeuge angemessen. Betrachtet man allerdings Konstruktionen wie Großraumflugzeuge, Raumstationen, Mobilroboter oder auch stationäre Bauwerke wie Hochhäuser, so ist hier die Annahme einer starren Struktur nicht mehr erfüllt. Berücksichtigt man andererseits neben der Größe die Formänderung der Struktur, so lässt sich nicht nur die Leistungsfähigkeit und Zuverlässigkeit integrierter Navigationssysteme steigern, sondern es ergibt sich z.B. auch die Möglichkeit einer Strukturregelung und/oder -überwachung. Zur Erfassung der Flexibilität der Struktur müssen die Sensoren freilich nun über die Fahrzeugstruktur verteilt werden. In solchen Fällen ist dann auch angemessener, von integrierter Bewegungsmessung zu sprechen.
Im Rahmen des Projekts VIBES wurde die Auslegung derartiger integrierter Bewegungsmessverfahren für balkenartige Strukturen, wie sie beispielsweise bei Flugzeugflügeln vorliegen, untersucht und experimentell erprobt. Im Mittelpunkt standen dabei die angemessene kinematische Beschreibung der Balkenverformungen z.B. mit Schwingungsmoden und Krylov-Vektoren sowie verschiedene Sensorkonfigurationen, d.h. sowohl Sensorarten wie auch -verteilungen. Mit diesen Arbeiten konnten Anwendbarkeit und Nutzen der integrierten Bewegungsmessverfahren für Balkenstrukturen simulativ und experimentell nachgewiesen werden.
Die Arbeiten wurden mit Mitteln der DFG gefördert (FKZ: WA 1583/3-1 und WA 1583/3-3).
Literatur:
- Örtel, T.; Wagner, J.; Saupe, F.: Integrated motion measurement illustrated by a cantilever beam. In: Mechanical Systems and Signal Processing 34 (2013), S. 131-145
Zusammenfassung - Örtel, T.: Integrierte Bewegungsmessung an flexiblen Strukturen. München: Verlag Dr. Hut, 2010
- Örtel, T.; Wagner, J.: Integrated Motion Measurement for Flexible Structures Using a Modal and Krylov Subspace Model Reduction Approach. In: Journal of Intelligent Material Systems and Structures 20 (2009), Nr. 15, S. 1889-1898
Zusammenfassung - Örtel, T.; Wagner, J.: Integrated Motion Measurement for Flexible Structures. In: Technische Mechanik 27 (2007), Nr. 2, S. 94-114
Download - Wagner, J.: Adapting the Principle of Integrated Navigation Systems to Measuring the Motion of Rigid Multibody Systems. In: Multibody System Dynamics 11 (2004), Nr. 1, S. 87-110
Zusammenfassung - Wagner, J.; Kasties, G.: Applying the Principle of Integrated Navigation Systems to Estimating the Motion of Large Vehicles. In: Aerospace Science and Technology 8 (2004), Nr. 2, S. 155-166
Zusammenfassung - Wagner, J.: Zur Verallgemeinerung integrierter Navigationssysteme auf räumlich verteilte Sensoren und flexible Fahrzeugstrukturen. Düsseldorf: VDI Verlag, 2003
Download
Ein zentrales Merkmal der Experimentellen Modalanalyse zur Charakterisierung der Schwingungseigenschaften elastischer Strukturen sind räumlich verteilte Beschleunigungsmesser. Im Gegensatz zu diesem frequenzbasierten Verfahren wird für echtzeitbasierte Aufgaben wie die Bewegungssteuerung oder die Zustandsüberwachung solcher mechanischer Systeme bisher nur wenig von verteilten Inertialsensoren Gebrauch gemacht. Um Ansätze für solche Aufgaben zu verbessern, bietet sich daher eine vertiefte Messung der Strukturbewegung mit verteilten Beschleunigungsmessern und zusätzlich Gyroskopen und Dehnungsmessstreifen an. Für eine solche Anwendung der integrierten Bewegungsmessung ist freilich zu beachten, dass die Anzahl verwendeter Sensorsignale nicht beliebig hoch sein kann.
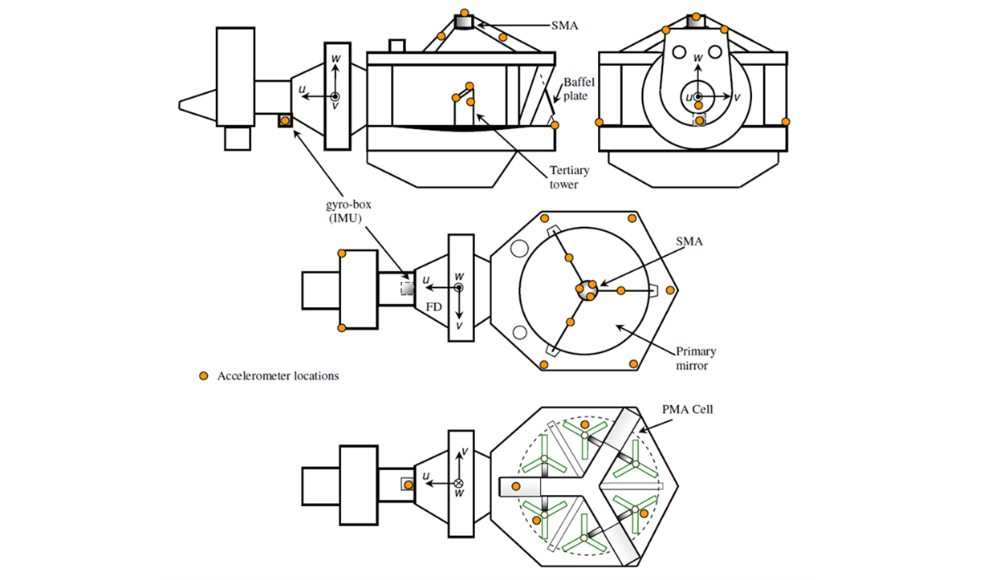
In Erweiterung der Theorie, die bei flexiblen Balken zum Einsatz kommt (Projekt VIBES), wird im Rahmen des Projekts für das Teleskop des fliegenden Observatoriums SOFIA ein dreidimensionaler Ansatz verfolgt. Damit soll ein integriertes Verfahren zur Echtzeitschätzung der kritischen, d.h. optisch schädlichen Teleskopschwingungen bereitgestellt werden. Die Schwingungen werden durch aeroakustische Störungen hervorgerufen.
Um ein solches integriertes Messsystem zu realisieren, sind keine Masse- und Steifigkeitseigenschaften der Struktur erforderlich. Für die Implementierung dieser Methode ist jedoch die ungefähre Kenntnis der Modaleigenschaften der Struktur notwendig. Daher wurde ein Finite-Elemente-Modell des Teleskops als Basis gewählt, um solche modalen Eigenschaften zu extrahieren. Darüber hinaus wurde das Finite-Elemente-Modell verwendet, um die geeignete Anzahl, Position und Ausrichtung der Kreisel, Beschleunigungsmesser und Dehnungsmessstreifen zu bestimmen. Die Simulationsergebnisse zeigen das Potenzial des Ansatzes und seine Machbarkeit für komplexe Leichtbaustrukturen.
Literatur:
- Kaswekar, P.: Integrated motion measurement of three-dimensional lightweight structures. München: Verlag Dr. Hut, 2017
- Kaswekar, P.; Wagner, J.: Sensor fusion based vibration estimation using inertial sensors for a complex lightweight structure. In: Trommer, G. (Hrsg.): 2015 DGON Inertial Sensors and Systems. Karlsruhe: IEEE, 2015, S. 10.1-10.20
Zusammenfassung - Kaswekar, P.; Greiner, B.; Wagner, J.: The integrated motion measurement simulation for SOFIA. In: Stepp, L.; Gilmozzi, R.; Hall, H. (Hrsg.): Ground-based and Airborne Telescopes V, Proc. of SPIE. Vol. 9145. Bellingham, WA: SPIE, 2014, S. 91454F.1-91454F.15
Zusammenfassung - Wagner, J.: Adapting the Principle of Integrated Navigation Systems to Measuring the Motion of Rigid Multibody Systems. In: Multibody System Dynamics 11 (2004), Nr. 1, S. 87-110
Zusammenfassung - Wagner, J.; Kasties, G.: Applying the Principle of Integrated Navigation Systems to Estimating the Motion of Large Vehicles. In: Aerospace Science and Technology 8 (2004), Nr. 2, S. 155-166
Zusammenfassung - Wagner, J.: Zur Verallgemeinerung integrierter Navigationssysteme auf räumlich verteilte Sensoren und flexible Fahrzeugstrukturen. Düsseldorf: VDI Verlag, 2003
Download
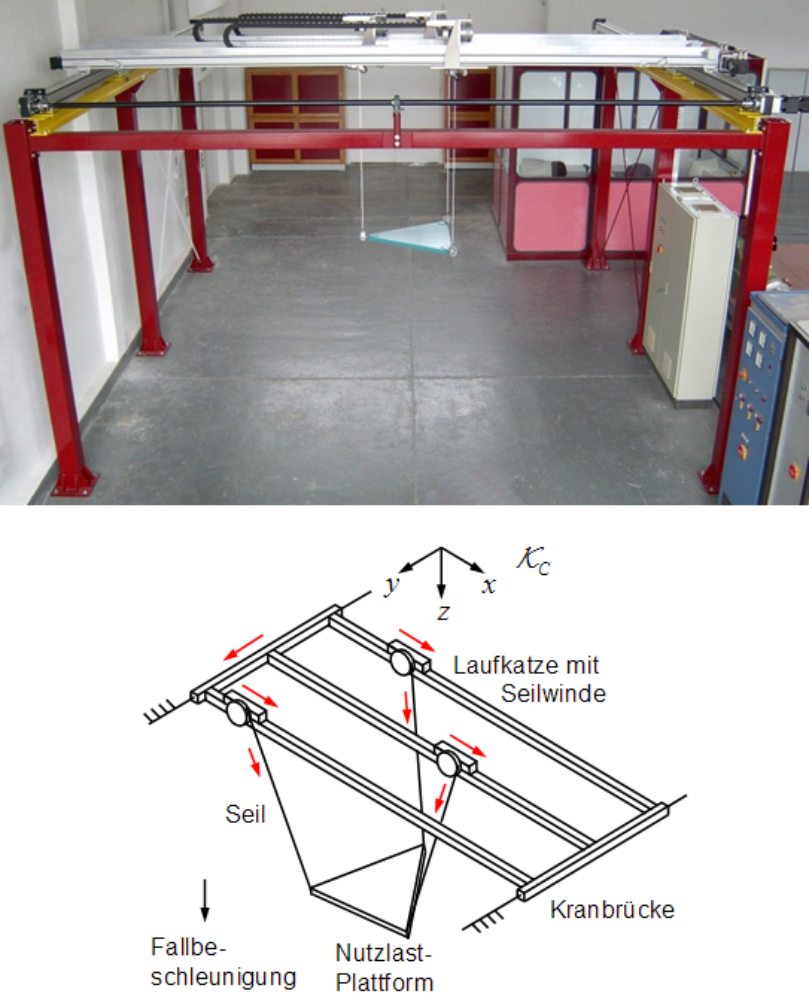
Bei Kränen stellt die Vermeidung von Pendelschwingungen der Nutzlast hohe Anforderungen an die Geschicklichkeit des Kranführers. Zu seiner Entlastung können die Pendelschwingungen durch eine Regelung automatisch gedämpft werden. Dazu werden Informationen über den Ist-Bewegungszustand der Nutzlast benötigt. Schätzungen dieses Zustands basieren auf mathematischen Verfahren und verschiedenen Sensorsignalen. Wird neben der Lage auch die Geschwindigkeit der Nutzlastplattform bestimmt, so können zur Pendeldämpfung Lage- und Geschwindigkeitsregler eingesetzt werden, die gegenüber reinen Lagereglern eine bessere Regeldynamik liefern.
Im Rahmen des Projekts CABLEV (CABle LEVitation) wurde der Einsatz von Inertialmesssystemen und das Verfahren der integrierter Bewegungsmessung zur verbesserten Erfassung des Bewegungszustands der Nutzlast von Kränen untersucht. Basis hierfür bildete das am Lehrstuhl für Technische Mechanik / Dynamik der Universität Rostock entwickelte seilgeführten Handhabungssystems gleichen Namens. Im Rahmen der Arbeiten konnte die grundsätzliche Anwendbarkeit und der signifikante Nutzen der integrierter Bewegungsmessverfahren auf die Steuerung von Kränen nachgewiesen werden.
Die Arbeiten fanden in Kooperation mit dem Lehrstuhl für Technische Mechanik / Dynamik der Universität Rostock statt. Sie wurden mit Mittteln der DFG gefördert (FKZ: WA 1583/5-1und WO 452/7-2).
Literatur:
- Meinicke, A.:, S.: Kalibrierung von Inertialmesssystemen und integrierte Navigation zur Lageregelung eines Mehrseilkrans. Universität Rostock, Diss., 2009
- Meinicke, A.; Woernle, C.; Wagner, J.: Kompensation der Lagefehler der Inertialsensoren in einer IMU. In: Proc. in Appl. Math. and Mech.: PAMM 6 (2006), S. 103-104
Download

Klassische technische Anwendungen der Inertialsensorik sind geprägt von hohen Anforderungen an Genauigkeit und Zuverlässigkeit. In der Biomechanik hingegen dominieren vielfach Forderungen nach geringer Größe, niedrigem Gewicht, günstigen Kosten und leichter Handhabung. Hintergrund sind dabei Anwendungen im Sport wie Leistungs- und Wettkampfdiagnostik und in der Medizin wie klinische Diagnostik, Verfolgung von Rehabilitationsverläufen oder Erfassung des motorischen Lernens.
Die Professur verfügt über langjährige Erfahrungen zur Auslegung von Messsystemen für Forschungsarbeiten zur Gleichgewichtsmotorik. Hierzu gehören das erste Kreiselmesssystem für Ruderboote, mit dem weltweit Pionierarbeit geleistet wurde, sowie ein integriertes Messsystem für den Turn- und Therapiekreisel, das auf die besonderen kinematischen Verhältnisse dieses Geräts zugeschnitten wurde.
Literatur:
- Wagner, J.: About Motion Measurement in Sports Based on Gyroscopes and Accelerometers - an Engineering Point of View. In: Gyroscopy and Navigation 9 (2018), Nr. 1, S. 1-18
Zusammenfassung - Wagner, J.: Inertial and Integrated Motion Measurement Systems in Biomechanics. In: 23rd Saint Petersburg International Conference on Integrated Navigation Systems. St. Petersburg: State Research Center of the Russian Federation, Concern CSRI Elektropribor, JSC, 2016, S. 467-477
Zusammenfassung - Lippens, V.; Nagel, V.; Wagner, J.: Geschickte Koordinations-Leistung in bewegten Situationen. Zur Regulation eines dynamischen Systemgleichgewichts in gerätegebundenen Sportarten. In: Nagel, V. (Hrsg.): Inline-Skating: Trends - Entwicklungsperspektiven - Anwendungsfelder. Hamburg: Czwalina, 2010, S. 89-100
Zusamenfassung - Wagner, J. et al.: Generalising Integrated Navigation Systems: The Example of the Attitude Reference System for an Ankle Exercise Board. In: Sorg, H. (Hrsg.): Symposium Gyro Technology 2001. Stuttgart: Universität Stuttgart / Deutsche Gesellschaft für Ortung und Navigation, 2001, S. 18.1-18.16
Zusammenfassung - Wagner, J.; Bartmus, U.; de Marées, H.: Three-Axes Gyro System Quantifying the Specific Balance of Rowing. In: International Journal of Sports Medicine 14 (1993), Supplement Nr. 1, S. S35-S38
Zusammenfassung